La precisión de la producción pecuaria constituye una expansión del concepto de agricultura de precisión, que incluye todos los componentes de los ecosistemas agrícolas, especialmente las interacciones animal y planta-animal: La ganadería de precisión
El suelo, las plantas y las interacciones suelo-planta son temas de la agricultura de precision en cada finca, donde el objetivo principal es explorar la heterogeneidad espacial natural para aumentar la eficiencia y reducir los impactos en el medio ambiente.
Para la mayoría de las situaciones, la agricultura de precision se ha evaluado y desarrollado en sistemas de cultivo intensivo y se presta poca atención a los sistemas de pastoreo y los sistemas de integración de cultivos y ganado.
La ganadería de precision, se centra en el componente animal y explora la heterogeneidad en el espacio y entre animales individuales, para lograr sistemas de producción ambientalmente apropiados y una mayor eficiencia.
En la ganadería de precision, el pastoreo de precisión consiste en la integración de las tecnologías de la información y la comunicación con el conocimiento sobre el comportamiento animal y su fisiología. Y esto tiene como objetivo, aumentar la producción de carne, la producción de leche y la producción de lana, realizada en situaciones de pastoreo.
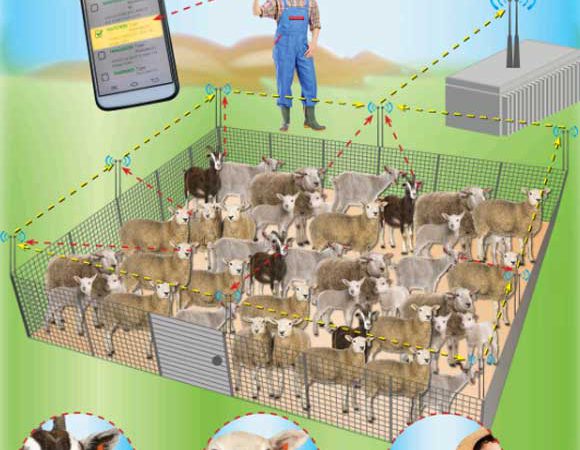
Los dos objetivos más importantes son minimizar el pastoreo excesivo en áreas susceptibles y maximizar la calidad del producto animal aumentando la trazabilidad. Un sistema integrado de pastoreo de precisión se describe por sus componentes: sensores de posición animal, estado fisiológico y de comportamiento, el tiempo real de transmisión de información a un sistema que apoya la toma de decisiones y la respuesta a través de información diversa a un instrumento.

El control de los movimientos de los animales y la elección de la dieta, se basa en el conocimiento de las respuestas específicas de las especies a diversos estímulos del entorno dentro del paradigma de la aversión al sabor y el comportamiento. Los avances recientes disponibles en tecnología e instrumentos se revisan brevemente y se asocian con los sistemas actuales de identificación de rebaños. El concepto de pastoreo de precisión se presenta ampliamente y se discuten las áreas que necesitan investigación y desarrollo futuros.
Introducción a la ganadería de precisión
El mundo enfrenta desafíos ambientales sin precedentes en los que la producción ganadera ocupa un lugar central. Un controvertido informe de las Naciones Unidas (Steinfeld et al., 2006) indicó que el pastoreo de ganado ocupa el 26% de la superficie terrestre y que el pastoreo ha llevado a la degradación del 20% de los pastizales y pastizales (73% de los pastizales en áreas secas). Independientemente de si los impactos de la ganadería son menos malos o peores que en otros sectores, el hecho es que la producción ganadera genera inmensos beneficios para los humanos, pero también tiene consecuencias negativas en la tierra. Por lo tanto, tenemos que mejorar los sistemas ganaderos para minimizar los impactos ambientales manteniendo una alta productividad, calidad y eficiencia energética.
A medida que los mercados y las economías se vuelven globales, surgen nuevas oportunidades y desafíos. Los productores de carne roja de muchos países ahora pueden competir en mercados de alta gama donde el éxito depende fundamentalmente de poder ofrecer un producto seguro y saludable. Esto es particularmente importante para los productores de Argentina, el sur de Brasil y Uruguay, donde los mercados cruciales dependen del control de la fiebre aftosa, el bajo riesgo de encefalopatía espongiforme bovina y la certificación del origen de la carne de res orgánica y alimentada con pasto.
En este contexto, propongo extender los conceptos de agricultura de precisión a la producción ganadera en todos los niveles. La producción ganadera de precisión se refiere a la explotación de múltiples niveles de heterogeneidad y respuestas no lineales en los procesos de producción, para aumentar la rentabilidad y reducir los impactos ambientales.
El enfoque busca hacer uso de grandes cantidades de información específica sobre animales individuales y ubicaciones, para optimizar el rendimiento.
En este artículo, me centro en un sistema para el manejo del pastoreo de precisión como parte del complejo de producción ganadera de precisión. Este trabajo integra conocimientos sobre comportamiento animal, manejo del pastoreo, posicionamiento global y tecnología de comunicaciones para abordar simultáneamente los desafíos y oportunidades ambientales y de mercadeo que plantea el manejo del pastoreo.
La Ganaderia de Precision como Sistema Integrado
El sistema propuesto está diseñado para proporcionar tres funciones básicas e independientes: 1) posición y comportamiento de los animales; 2) pastoreo y alimentación remotos, y, 3) manejo de la salud y trazabilidad de precisión.

La primera y la tercera funciones implican principalmente el registro y transmisión de datos del animal al administrador y el procesamiento de datos en información de gestión. La segunda función incorpora la capacidad de efectuar acciones de gestión de forma remota. La tercera función proporciona información con fines de identificación animal, certificación de origen y gestión sanitaria. Esta última función es similar a la primera, pero su diseño está separado, para permitir el uso de las otras dos funciones de manera independiente cuando los datos de certificación y reglamentarios no se desean o no son apropiados.
En la actualidad, el sistema se encuentra en fase de diseño y prototipo. Buscamos las mejores tecnologías para lograr un buen equilibrio entre autonomía, intensidad de datos, precisión y costo. Debido a las diferencias en la infraestructura de comunicaciones y los mercados entre países, es probable que diferentes configuraciones funcionen mejor en diferentes condiciones.
Base de comportamiento animal: Base de la Ganaderia de Precision
Los principios generales del comportamiento animal y las características específicas del comportamiento del ganado rumiante proporcionan una base para desarrollar un sistema para gestionar el comportamiento dietético y espacial del ganado. El estudio de las aversiones al sabor y su uso para el entrenamiento dietético ha sido intenso y prolífico en los últimos veinte años. Por el contrario, el estudio del aprendizaje instrumental o del condicionamiento operante del ganado ha sido muy limitado, presumiblemente porque se percibía como de poca aplicabilidad. En esta sección, considero ambos como componentes de la base conductual para controlar el movimiento de los animales y las dietas con el sistema de pastoreo de precisión.
Aversiones y preferencias de sabor
Al contrario de lo que se asumió originalmente, el ganado rumiante tiene un sistema intestino-cerebro con la capacidad de formar aversiones al sabor claras y duraderas, muy similar al sistema de los animales monogástricos. Provenza (1996b) afirma que una aversión es «la disminución en la preferencia por los alimentos que se acaban de comer como resultado de la información sensorial (el sabor, el olor, la textura de un alimento, es decir, su sabor) y los efectos postingestivos (efectos de los nutrientes y toxinas sobre la quimioterapia). , osmo- y mecano-receptores) únicos para cada alimento «. El mecanismo de la aversión al sabor implica conexiones neuronales a través del nervio vago entre el intestino y el centro emético del cerebro que funcionan de forma completamente independiente de la conciencia o la capacidad cognitiva del animal (Provenza et al., 1994). Los sabores de nuevos alimentos se asocian con las consecuencias postingestivas después de un cierto retraso, de manera que la exposición posterior al mismo sabor estimula el sistema emético y da como resultado la evitación de los alimentos que causaron el malestar gastrointestinal (GI).

El mecanismo de aversión al sabor probablemente evolucionó como consecuencia de la interacción de los animales con las plantas dañinas y tiene un valor adaptativo. Sin embargo, el mecanismo es falible, particularmente si las correlaciones naturales entre el sabor y las consecuencias de la IG se manipulan para promover objetivos humanos distintos de la optimización de la nutrición animal, como la protección de cultivos y árboles. Al permitir que los animales prueben los cultivos como nuevos alimentos y dosificarlos con una sustancia que produce malestar gastrointestinal, se crea una aversión al sabor del cultivo, aunque el cultivo es completamente seguro. El mecanismo de aversión al sabor probablemente evolucionó como consecuencia de la interacción de los animales con las plantas dañinas y tiene un valor adaptativo.
Sin embargo, el mecanismo es falible, particularmente si las correlaciones naturales entre el sabor y las consecuencias de la IG se manipulan para promover objetivos humanos distintos de la optimización de la nutrición animal, como la protección de cultivos y árboles. Al permitir que los animales prueben los cultivos como nuevos alimentos y dosificarlos con una sustancia que produce malestar gastrointestinal, se crea una aversión al sabor del cultivo, aunque el cultivo es completamente seguro. El mecanismo de aversión al sabor probablemente evolucionó como consecuencia de la interacción de los animales con las plantas dañinas y tiene un valor adaptativo. Sin embargo, el mecanismo es falible, particularmente si las correlaciones naturales entre el sabor y las consecuencias de la IG se manipulan para promover objetivos humanos distintos de la optimización de la nutrición animal, como la protección de cultivos y árboles. Al permitir que los animales prueben los cultivos como nuevos alimentos y dosificarlos con una sustancia que produce malestar gastrointestinal, se crea una aversión al sabor del cultivo, aunque el cultivo es completamente seguro.
La preferencia de sabor es un proceso funcionalmente relacionado mediante el cual los animales aprenden a preferir sabores que están asociados con consecuencias postingestivas y nutricionales positivas (Myers, 2007). La preferencia de sabor se ha documentado en rumiantes, y los tipos de respuestas al entrenamiento pueden ser ricos (Villalba y Provenza, 1996, 1997a, b, 1999, 2000a, Villalba et al., 1999). Por ejemplo, Ralphs et al., (1995) encontraron que se podría entrenar a las ovejas para que prefieran alimentos con un cierto sabor asociando el sabor con una dosis intraruminal de glucosa. Sorprendentemente, también encontraron que altas dosis de propionato generaban una aversión, lo que indica que los nutrientes pueden actuar como estímulos positivos o negativos dependiendo de la concentración.
La aversión al sabor y el aprendizaje de preferencias tienen múltiples características que pueden explotarse para manipular las dietas. La neofobia, la extinción, el muestreo, la generalización y las complementariedades son algunas de las más relevantes. La neofobia es la ingesta reducida de nuevos alimentos. Puede mejorarse creando múltiples aversiones a los nuevos sabores (Dutoit et al., 1991) o reducirse agregando sabores familiares a los nuevos alimentos (Launchbaugh et al., 1997), porque los animales generalizan principalmente sobre la base del sabor y no de la forma. de plantas (Ginane & Dumont, 2006), aunque las correlaciones entre forma y sabor podrían desarrollarse a través del condicionamiento clásico.
La neofobia es más intensa cuando los nuevos alimentos se encuentran en entornos desconocidos (Burritt y Provenza, 1997). La extinción es el proceso mediante el cual las aversiones se atenúan con el tiempo. Los animales siempre prueban los alimentos, incluso cuando tienen aversión al sabor. Si el muestreo no tiene consecuencias negativas, la ingesta de alimentos aumenta progresivamente. La persistencia de las aversiones se puede mejorar proporcionando forrajes alternativos, particularmente cuando las alternativas son complementarias a la dieta básica (Kimball et al., 2002). Finalmente, los rumiantes tienen una mayor susceptibilidad a formar preferencias y aversiones a largo plazo cuando son jóvenes (Launchbaugh et al., 2001), y son capaces de regular la ingesta de químicos que mejoran los efectos deletéreos de las toxinas de las plantas (Provenza et al. , 2007, Villalba et al., 2006), particularmente cuando las alternativas son complementarias a la dieta básica (Kimball et al., 2002).
Finalmente, los rumiantes tienen una mayor susceptibilidad a formar preferencias y aversiones a largo plazo cuando son jóvenes (Launchbaugh et al., 2001), y son capaces de regular la ingesta de químicos que mejoran los efectos nocivos de las toxinas de las plantas (Provenza et al. , 2007, Villalba et al., 2006). particularmente cuando las alternativas son complementarias a la dieta básica (Kimball et al., 2002). Finalmente, los rumiantes tienen una mayor susceptibilidad a formar preferencias y aversiones a largo plazo cuando son jóvenes (Launchbaugh et al., 2001), y son capaces de regular la ingesta de químicos que mejoran los efectos deletéreos de las toxinas de las plantas (Provenza et al. , 2007, Villalba et al., 2006).
Así, los animales pueden ser «entrenados» para evitar alimentos perfectamente seguros y aumentar su preferencia por plantas que no son naturalmente preferidas (Villalba & Provenza, 2000b). El entrenamiento dietético será la base para controlar el comportamiento en el nivel más fino de resolución, como para modificar la presión de pastoreo sobre ciertas especies cuando se intercalan con otras.
Condicionamiento operante o aprendizaje instrumental
El condicionamiento operante o aprendizaje instrumental es la recurrencia de la conducta que resulta efectiva cuando los animales se exponen a las mismas situaciones de manera repetida, e implica la eliminación de aquellas conductas que son ineficaces (Staddon & Ettinger, 1989). Por lo tanto, cuando los perros realizan «trucos» cuando su amo les pide, muestran los resultados del modo de aprendizaje del condicionamiento operante. La situación se establece por orden del amo, y el perro responde con un comportamiento que es efectivo para obtener una recompensa, típicamente de comida. El condicionamiento operante se usa comúnmente para entrenar a los animales a realizar tareas o «trabajar» para obtener recompensas. En realidad, las recompensas pueden ser simplemente oportunidades para realizar comportamientos más deseables de acuerdo con el principio de Premack (Staddon y Ettinger, 1989).
El ganado vacuno y ovino ha sido capacitado para realizar complejas tareas espaciales y de forrajeo utilizando tanto refuerzo positivo como negativo. Edwards et al., (1996) y Laca y Ortega (1995) demostraron que las ovejas y el ganado asocian fácilmente señales visuales (césped de trébol y banderas de colores, respectivamente) con recompensas alimentarias. El ganado bovino (Laca, 1998) y el ovino (Hewitson et al., 2005) exhibieron la capacidad de responder con diferentes estrategias de forrajeo dependiendo de la naturaleza espacio-temporal de las recompensas alimentarias. Cuando la comida era predecible en el espacio y el tiempo, los animales implementaban búsquedas localizadas basadas en la memoria espacial, pero cuando la comida se localizaba de manera impredecible, los animales buscaban de manera sistemática. La resolución de conflictos entre la memoria espacial y las señales visuales parece tener un patrón.
Cuando las ovejas aprendieron la ubicación de la comida por experiencia, primero buscaron en lugares donde había comida en sesiones experimentales anteriores, y luego usaron las señales visuales (Edwards et al., 1996). Langbein et al., (2006) demostraron que las cabras pueden aprender tareas de discriminación operante con acceso autorregulado a un dispositivo automatizado. Las cabras mejoraron en el aprendizaje de nuevos símbolos a medida que fueron expuestas a nuevas tareas, demostrando que desarrollaron «conjuntos de aprendizaje» o aprendieron a aprender. El aprendizaje era mejor cuando los animales estaban en grupos estables y entornos sociales (Baymann et al., 2007). Las cabras mejoraron en el aprendizaje de nuevos símbolos a medida que fueron expuestas a nuevas tareas, demostrando que desarrollaron «conjuntos de aprendizaje» o aprendieron a aprender. El aprendizaje era mejor cuando los animales estaban en grupos estables y entornos sociales (Baymann et al., 2007). Las cabras mejoraron en el aprendizaje de nuevos símbolos a medida que fueron expuestas a nuevas tareas, demostrando que desarrollaron «conjuntos de aprendizaje» o aprendieron a aprender. El aprendizaje era mejor cuando los animales estaban en grupos estables y entornos sociales (Baymann et al., 2007).
La relación entre las características de las recompensas, incluidos los tradicionalmente llamados «programas de refuerzo» (Skinner, 1958) es particularmente importante para el pastoreo de precisión. Los experimentos de comportamiento con otros animales (en su mayoría ratas y palomas) muestran que la velocidad y la intensidad de las respuestas de comportamiento pueden modificarse drásticamente mediante el programa de recompensas. Los programas de intervalos fijos, donde la recompensa está disponible después de un intervalo fijo, provocan una ráfaga de respuestas que comienzan unos segundos antes de que finalice el intervalo y terminan abruptamente después de que se obtiene la recompensa. Por el contrario, los programas de intervalo variable en los que cada intervalo se establece aleatoriamente a partir de una distribución dada, promueven una tasa constante de respuestas porque siempre existe la probabilidad de que la recompensa siga a la respuesta conductual. Un programa de FRx de proporción fija proporciona una recompensa por cada x respuestas, mientras que en un programa de proporción variable el número de respuestas requeridas para una recompensa varía alrededor de una determinada media. Se ha demostrado para una variedad de mamíferos y aves que las respuestas siguen los patrones mostrados enFigura 2 , y que las animas tardan más en aprender los programas de intervalos que los programas de razón (Staddon y Ettinger, 1989).
La relación entre la tasa de respuesta y los programas de refuerzo, y las características del condicionamiento operante son cruciales para el desarrollo de métodos efectivos para mover y contener al ganado en pastizales extensos. Aunque estas relaciones se han estudiado en muchas especies, existe poca información sobre el ganado rumiante. La información específica de la especie es necesaria para el desarrollo de programas de capacitación porque es probable que las predisposiciones innatas difieran según los entornos en los que evolucionaron los comportamientos. Por ejemplo, Langbein et al., (2007a) determinaron que las cabras tienen preferencia por ciertos símbolos y que el aprendizaje se puede mejorar o ralentizar según los símbolos asociados con la recompensa. Además, la capacidad para aprender tareas que dependen de la discriminación de estímulos depende de la capacidad perceptiva, que es típicamente diferente entre especies. Por lo tanto, es necesaria una investigación fundamental sobre las características de percepción y aprendizaje del ganado rumiante para poder diseñar métodos de entrenamiento óptimos.
El condicionamiento operante tiene una característica que facilita el entrenamiento de muchos animales domésticos: los estímulos se pueden «encadenar» de manera que una señal de refuerzo secundaria (por ejemplo, un sonido de clic) ayude a cerrar la brecha de tiempo entre la respuesta (presionar la palanca) y el refuerzo primario ( comida). El «adiestramiento con clicker» se utiliza de forma rutinaria para perros y otros mamíferos, pero no se ha probado suficientemente en animales de granja. Los resultados con caballos parecen haber sido inconsistentes. McCall y Burgin (2002) encontraron que los caballos entrenados con refuerzo primario y secundario (sonido de clicker) se desempeñaron mejor que los controles cuando se expusieron solo al estímulo secundario. Sin embargo, la conducta aprendida se extinguió rápidamente en ausencia del reforzador principal. Por el contrario, Williams et al., (2004) no encontraron un efecto de refuerzo secundario. Las cabras enanas adiestradas con un reforzador secundario (sonido) presentado junto con el primario (agua) demostraron recordar y aprender más rápida y eficientemente que las cabras sin el refuerzo secundario (Langbein et al., 2007b). En este caso, el refuerzo secundario incluyó diferentes sonidos para las respuestas correctas e incorrectas, y los sonidos apropiados se presentaron simultáneamente con la recompensa o inmediatamente después de la respuesta incorrecta.
Los estímulos visuales parecen asociarse más fácilmente con las recompensas alimentarias que los acústicos en el ganado. Uetake y Kudo (1994) entrenaron al ganado para realizar una tarea cuando se les presentaba una luz y un sonido simultáneamente. Luego, el ganado fue probado bajo tres tratamientos: ambas señales simultáneamente como durante el entrenamiento, solo sonido y solo luz. El número total de respuestas correctas fue similar en los tratamientos de luz + sonido y luz, pero cuando se expusieron solo al sonido, los animales se desempeñaron mucho peor, lo que se interpretó como un dominio visual, al menos en relación con las recompensas alimentarias. Además, los autores determinaron que existe un predominio del color del verde al blanco y al rojo. Es probable que esto esté relacionado con el hecho de que las plantas verdes suelen ser más nutritivas que las que reflejan más luz en otras bandas del espectro. La mala respuesta del ganado a las señales sonoras fue corroborada por Wredle et al., (2006) cuando intentaron entrenar a las vacas lecheras para que se acercaran a la sala de ordeño en respuesta a un sonido. Sospecho que las señales de sonido tienen una baja probabilidad de estar asociadas con recompensas alimentarias en herbívoros, y que son particularmente ineficaces cuando las respuestas deseadas son de naturaleza direccional y los sonidos se originan en dispositivos montados en los animales, como se implementa típicamente en «vallas virtuales «aplicaciones.
Instrumentación en la Ganadería de Precisión
Un sistema de control consta al menos de sensores que miden variables relacionadas con el estado del sistema y actuadores que proporcionan entrada de masa, momento o información al sistema hacia la modificación direccional del estado. Un sistema de pastoreo de precisión debe tener variables definidas que necesitan ser medidas y acciones o insumos específicos para crear un repertorio de acciones de manejo.
El estado del animal es estimado por la historia -hasta un tiempo reciente- de posición, actividad, temperatura, peso vivo y otras variables fisiológicas de todos los individuos del rebaño. El estado del resto del ecosistema, particularmente de la comunidad vegetal, se puede caracterizar por la cantidad y composición del pasto en el espacio, digamos por cada área de 10 x 10 mo 30 x 30 m del paisaje disponible. Otros atributos como posición de sombra, abrevaderos naturales, y la topografía puede considerarse constante o parte de la «estructura» del sistema en lugar de su estado cambiante. En este trabajo me centro en el componente animal, aunque el componente vegetal puede ser igualmente importante y variable, y también es objeto de sensores e insumos como en la agricultura de precisión.
Identificación en la ganaderia de precision
El desarrollo y comercialización de sistemas de identificación animal está muy avanzado. Hay una variedad de sistemas disponibles, algunos de los cuales funcionan razonablemente bien y han sido adoptados a nivel de país. Canadá adoptó un sistema nacional obligatorio de identificación de bovinos y bisontes en 2001, seguido del sistema ovino en 2004. Todos los animales deben ser identificados y etiquetados antes de salir de su lugar de origen o al ingresar al país.
Chile implementó un sistema de registro y trazabilidad de bovinos mediante el cual se deben registrar todos los ranchos y animales. Al igual que el sistema adoptado en Uruguay, el sistema chileno exige que todos los movimientos de animales se registren en el sistema nacional.
Estos sistemas facilitan enormemente la trazabilidad y certificación de productos, particularmente de la carne de vacuno, y por lo tanto son herramientas cruciales para minimizar las pérdidas y las interrupciones del mercado causadas por la enfermedad de las «vacas locas» y la fiebre aftosa. Los tipos de dispositivos utilizados para la identificación son revisados por Felmer et al. (2006). Estos dispositivos son «pasivos» en el sentido de que no registran ni transmiten ninguna información a menos que sean consultados por otro dispositivo que también proporcione la energía necesaria para la transmisión.
El tipo de dispositivos necesarios para el control de precisión del pastoreo serviría como estaciones de consulta «itinerantes» que también podrían informar y registrar los movimientos de los animales en tiempo real. El sistema integrado resultante sería muy superior a los sistemas actuales al menos en dos áreas: retransmisión de información en tiempo real y alta resolución espacial de registros. Una mayor resolución espacial y temporal de la información mejorará significativamente la capacidad de detectar y detener los brotes de enfermedades. Uno solo puede comenzar a imaginar todos los usos que los productores y consumidores encontrarán para dicha información, pero es seguro predecir que facilitará la facturación de las tarifas de pastoreo, el seguimiento y la contabilidad de la propiedad de los animales, la recuperación de los animales perdidos, la minuciosidad de los tratamientos de salud. y manejo de rebaños en general.
Los GPS en la ganadería de precisión
El uso de «collares» GPS para ganado se ha generalizado en los últimos diez años. Esto abrió la posibilidad de registrar información detallada sobre la posición durante largos períodos de tiempo, lo que permitió una comprensión más completa de los hábitos y las causas de la distribución espacial de los rumiantes. Clark y col. (2006) desarrollaron un sistema de bajo costo que incorpora la capacidad de cargar programas y recibir datos de las unidades móviles utilizando tecnología de radio sin la necesidad de asignaciones de frecuencia permanentes. Hay otras unidades comerciales disponibles, pero son más caras y tienen menores capacidades.
La tecnología GPS actual puede determinar la posición de animales individuales con precisión. La información de posición se puede almacenar en pequeñas tarjetas de memoria junto con grandes cantidades de datos fisiológicos y de comportamiento y se puede transmitir a un centro de gestión en tiempo real o en sesiones periódicas. Dada la historia de los precios en la tecnología electrónica, es muy probable que con la inversión adecuada en investigación y desarrollo, podamos tener sistemas de información de rebaños rentables, con los que seremos capaces de ver dónde y cómo están todos nuestros animales y qué son. estás haciendo en cualquier momento.
Sensores de comportamiento animal: Un instrumento de la ganaderia de precision
Los collares de GPS comerciales generalmente incluyen tres sensores: temperatura, movimiento de adelante hacia atrás y movimiento de izquierda a derecha. Los datos registrados por estos sensores son algo ambiguos, pero se pueden desarrollar modelos para inferir actividad. Buerkert y Schlecht (2009) encontraron diferencias significativas en exactitud y precisión entre diferentes unidades, particularmente en terrenos accidentados. Ungar y col. (2005) encontraron que la mayor parte de la actividad de pastoreo podría identificarse con modelos desarrollados, pero con frecuencia otras actividades se clasificaron como pastoreo. Las tasas generales de clasificación errónea fueron del 12 al 14% para todas las actividades. Debido a que la precisión del GPS es peor que 5 m (Agouridis et al., 2004), las coordenadas registradas varían incluso cuando los animales están estacionarios. Por otro lado, las grandes distancias entre registros sucesivos indican un movimiento direccional no relacionado con el pastoreo. Aunque Ungar et al. (2005) concluyeron que la distancia por sí sola es un mal predictor de la actividad ganadera, Putfarken et al. (2008) clasificaron las actividades como pastoreo si las distancias entre puntos fijos a intervalos de 5 minutos estaban entre 6 y 100 m, y obtuvieron índices de clasificación correctos de 94,3 y 89,4 para bovinos y ovinos.
Se necesitan varios tipos de sensores para un registro detallado del comportamiento. Los interruptores de mercurio han sido útiles para documentar no solo los movimientos de la cabeza, sino también el comportamiento al caminar y acostarse. El sistema utilizado por Champion et al. (1997) registraron pasos y mentiras / parados en ovejas y ganado con más del 90% de concordancia entre el comportamiento registrado y el observado directamente. Quizás el sistema más desarrollado para medir el comportamiento de pastoreo es el Registrador de Comportamiento IGER (Rutter et al., 1997), que registra los movimientos de la mandíbula con concordancia superior al 90%. Sin embargo, este sistema ignora el hecho de que los rumiantes combinan morder y masticar durante el pastoreo (Ginnett & Demment, 1997; Laca et al., 1994; Laca & WallisDeVries, 2000), y debe mejorarse en consecuencia.
El monitoreo acústico del pastoreo (Laca y WallisDeVries, 2000) proporciona una rica información que puede usarse no solo para clasificar comportamientos sino también para estimar la tasa de ingesta e incluso la composición de la dieta en pastos simples (Galli et al., 2006). Ungar y Rutter (2006) determinaron que el método acústico es significativamente mejor que el Registrador de comportamiento IGER para la clasificación de los movimientos de la mandíbula, e indicaron que era necesario desarrollar sistemas de decodificación automatizados para que el método acústico fuera de uso práctico. Dicho sistema de decodificación se ha creado y presenta una precisión aceptable, pero necesita un mayor desarrollo (Milone et al., 2009).
Existe una rica historia de desarrollo de sensores para detectar y registrar el tipo y la tasa de comportamiento de los herbívoros. Se han probado sensores para medir el ángulo de la cabeza (Schwager et al., 2007), la aceleración de la cabeza, la aceleración de las piernas, los pasos (podómetros), la deglución, los movimientos de la mandíbula, los sonidos de morder y masticar, el peso, la frecuencia cardíaca (Brosh et al., 2006) , temperatura central (Eigenberg et al., 2008), etc. Estos sensores fueron revisados por Frost et al. (1997).
Monitoreo de peso vivo y salud
Los sensores y las técnicas para el control del peso y la salud están bien desarrollados para la producción lechera en condiciones reducidas. El comportamiento y los cambios en el comportamiento se pueden utilizar para detectar problemas de salud antes de que la enfermedad afecte la productividad animal. González y col. (2008) pudieron detectar el 80% de los problemas de salud relacionados con la cetosis, la locomoción y la cojera al menos un día antes que el personal de la granja mediante el análisis de la alimentación a corto plazo. La cetosis y la cojera aguda se manifestaron por picos descendentes en la ingesta, mientras que la cojera crónica fue detectable por una tendencia descendente en la ingesta durante varios días.
Firk y col. (2002) tuvieron éxito en el uso de un podómetro y un análisis avanzado de series de tiempo para detectar el estro en vacas lecheras, pero el sistema arrojó un número excesivo de falsos positivos. La temperatura central de las vacas lecheras se puede estimar con un bolo intrarreticular permanente que está disponible comercialmente, sin embargo, las temperaturas deben ajustarse para que sean comparables a la temperatura rectal (Bewley et al., 2008).
Se han desarrollado y probado métodos confiables a distancia para pesar el ganado. La mayoría de estos dispositivos permiten la entrada pasiva de animales a una rampa con plataforma de pesaje y lector de etiquetas de identificación. Los animales ingresan al conducto para acceder al agua o al alimento. El pesaje remoto es menos perjudicial para los animales y funciona de manera eficaz (Charmley et al., 2006).
Cercas o vallas virtuales y ganaderia de precision
Poder controlar el comportamiento espacial del ganado sin tener que construir vallas caras e inflexibles es la próxima frontera del manejo del pastoreo, particularmente en los países más desarrollados, donde el pastoreo es demasiado costoso o simplemente poco práctico. El ganado responde a estímulos táctiles, visuales y auditivos y se puede entrenar para responder de maneras específicas.
Los investigadores han intentado crear dispositivos que puedan entrenar al ganado para que se mantenga alejado de ciertas áreas o para que se mueva en la dirección deseada proporcionando señales seguidas de castigo cuando se muestra una respuesta incorrecta. En general, estas «vallas virtuales» no han tenido tanto éxito como se esperaba, pero fueron efectivas para modificar el movimiento de los animales (Bishop-Hurley et al., 2007). Anderson (2007) ofrece una revisión completa del concepto de vallas virtuales y su estado actual.
Creo que el concepto de cercas virtuales se puede ampliar para lograr mejores resultados. En lugar de pensar en dispositivos para evitar que los animales entren en ciertas áreas y en lugar de utilizar refuerzos exclusivamente negativos como descargas eléctricas, deberíamos diseñar sistemas generales para controlar o guiar el movimiento de los animales utilizando refuerzos positivos y conjuntos de estímulos y programas de recompensa cuidadosamente diseñados. El sistema de control de animales debe ser flexible y estar orientado a utilizar animales como producto y como agentes para el manejo del paisaje (Butler et al., 2006).
Las posibles deficiencias del paradigma típico de la cerca virtual son los tipos de estímulos utilizados y su falta de un componente direccional. Al salir de la zona «cercada» se avisa a los animales con un sonido que se origina en el collar o en la orejera adherida, y luego se les castiga con un choque no direccional que también se origina en el mismo dispositivo. Esto obliga a los animales a crear un nuevo mapa cognitivo basado en vincular los estímulos locales con cualquier estímulo espacial que puedan ver en el paisaje.
Propongo que investiguemos el control del movimiento mediante el uso de estímulos direccionales que se originan en lugares específicos del paisaje, y que los comportamientos correctos sean recompensados con la ayuda del encadenamiento de estímulos para acelerar la conformación de respuestas. Aprender sobre los estímulos que provienen del entorno es natural para los animales y ha estado sujeto a evolución y aprendizaje. Este es un conocimiento común entre las personas que manipulan y administran ganado. El ganado aprende rápidamente a ir al lugar de alimentación a la hora habitual de alimentación. Los animales aprenden a acercarse a la llamada de alimentación y al sonido de la comida y las bolsas de comida cuando se abren. Pueden aprender tareas espaciales complejas utilizando tanto la memoria espacial (utilizando elementos del paisaje como orientación) como estímulos visuales adquiridos rápidamente, como banderas de colores (Laca y Ortega, 1995).
Entrenamiento y control
El lado del actuador de una producción ganadera de precisión ciertamente incorporará el control de las plantas, el control de los animales y el control de las interacciones planta-animal. Las acciones de control relacionadas exclusivamente con el complejo planta-suelo caen dentro del ámbito de la agricultura de precisión tradicional con la salvedad de que en los sistemas de pastizales existen impedimentos importantes para el uso de maquinaria y métodos tradicionales.
El control que concierne exclusivamente al componente animal está bastante bien desarrollado para sistemas confinados como en la producción lechera (Schellberg et al., 2008) donde el comportamiento, la salud, el peso, la producción y la ingesta de alimento se monitorean de manera rutinaria para animales individuales identificados de manera única (González et al. ., 2008; Halachmi et al., 1998; Mottram, 1997; Pastell et al., 2008a; Pastell et al., 2008b; Peiper et al., 1993) y los animales se alimentan y gestionan de forma intensiva. Las áreas novedosas que requieren el mayor desarrollo se encuentran en el ámbito del control de los animales y las interacciones planta-animal en pastizales y sistemas de pastizales complejos.
Nuestro diseño incorpora estaciones de estímulo y recompensa programables y controladas de forma remota basadas en alimentadores disponibles comercialmente (por ejemplo, www.ontimefeeders.com ) con hardware adicional para mostrar señales visuales y emitir sonidos. Se utiliza una red de estaciones ubicadas en posiciones estratégicas del paisaje para entrenar y luego controlar los movimientos de los animales recompensando los comportamientos deseados con un alimento altamente palatable que se distribuye de acuerdo con cualquier horario de refuerzo deseado.
Conclusiones
La producción ganadera se encuentra en un período de rápido ajuste y desarrollo, tanto a nivel regional como mundial. Existen intensas presiones y oportunidades concurrentes asociadas con la necesidad de producir productos pecuarios seguros y respetuosos con el medio ambiente. Esto creó la necesidad y la oportunidad de utilizar sistemas de identificación y trazabilidad de animales a nivel nacional en muchos países.
Al mismo tiempo, los avances en las comunicaciones electrónicas y las tecnologías de GPS impulsados por los consumidores de información provocaron importantes caídas en los precios y mejoras en el rendimiento, abriendo una ventana de oportunidad para crear sistemas rentables para la producción ganadera de precisión a gran escala. Estamos en medio del período en el que se definirá el destino y alcance de este nuevo tipo de producción ganadera, y hay algunos aspectos claros por resolver.
La producción ganadera de precisión en pastizales y pastizales incluirá dos sistemas relacionados: recopilación de información e insumos de gestión. Existen múltiples sensores para recopilar información sobre el comportamiento de los animales, los precios de los dispositivos GPS se están volviendo asequibles para su uso a nivel de rebaño y se están desarrollando aplicaciones de cercas virtuales.
Es necesario un mayor desarrollo para mejorar el sistema de entradas de gestión de aplicaciones para modificar la producción y el comportamiento animal. En concreto, se necesita más investigación para generar mejores conjuntos de estímulos y dispositivos de entrenamiento para el ganado, incluidos los comederos controlados a distancia. Por último, los componentes deben integrarse completamente en sistemas completos que se puedan comercializar, de manera muy similar a como procedía la agricultura de precisión.