A principios del siglo XIX, un herrero llamado John Deere se mudó de Vermont a Illinois, donde notó que los granjeros estaban teniendo problemas. La tierra pegajosa de la pradera se acumulaba en sus tradicionales arados de hierro, lo que los obligaba a detenerse con frecuencia para limpiar las cuchillas.
Deere tuvo una idea y, en 1837, presentó su arado de acero «autofrenante» . La hoja cortó la tierra dura y llena de raíces, y su forma curva permitió que la tierra se volcara. La invención de Deere se conoció como «el arado que rompió las llanuras» y ayudó a transformar el Medio Oeste en tierras de cultivo fértiles. Su empresa homónima se convirtió en el mayor fabricante de arados del mundo.
Avance rápido hasta 1994, y el grupo de agricultura de precisión de John Deere, en Moline, Illinois, estaba comenzando a explorar un nuevo concepto en la agricultura conocido como agricultura de precisión. Aún en su infancia, la agricultura de precisión había atraído la atención de varias empresas de tecnología.
Rockwell International Corp., más conocida como contratista de defensa, desarrolló una de las primeras aplicaciones de agricultura de precisión. El Sistema de Posicionamiento Global en el que se basaba la agricultura de precisión era principalmente una constelación militar, y Rockwell utilizó su conocimiento de los satélites militares para diseñar su Sistema de Visión . Introducido en 1995, el sistema creó mapas de campo detallados. Según un informe de Los Angeles Times, la computadora del sistema conectada a una cosechadora registró el volumen de cultivos cosechados y emparejó esos números con los datos de ubicación. El mapa resultante reveló qué parcelas de tierra eran más productivas que otras. Los agricultores podrían hacer un seguimiento con pruebas de campo para determinar la composición del suelo y aplicar niveles específicos de fertilizantes e insecticidas en la siguiente temporada de siembra.
Pero después de una avalancha inicial de adopción, el interés de los agricultores en la agricultura de precisión comenzó a estancarse , por una serie de razones: el equipo tenía una curva de aprendizaje pronunciada, faltaba soporte técnico, los sistemas tenían fallas y eran costosos. Rockwell se unió a otras empresas que salían del campo justo cuando John Deere estaba aumentando su I + D.
Los ingenieros de Deere sabían que tenían que resolver el problema que había desafiado a sus competidores: ¿Cuál era la aplicación asesina que justificaría el costo de la agricultura de precisión y haría que los agricultores quisieran usarla? Como había hecho el fundador de la empresa antes que ellos, decidieron que una mejor arada era la respuesta.
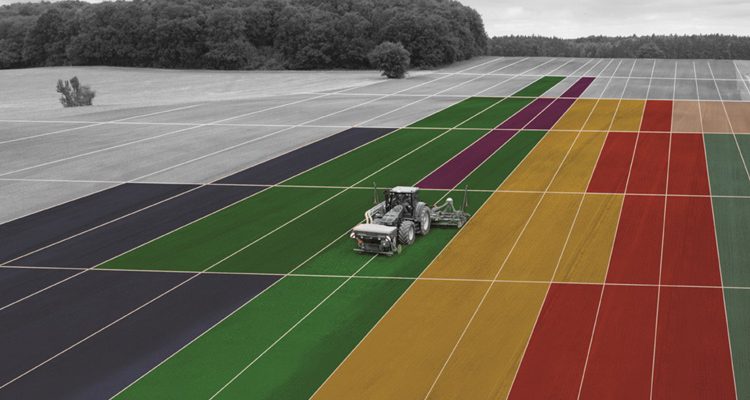
Al arar un campo sin GPS, un agricultor generalmente tenía casi un metro de superposición entre filas. Reducir esa superposición significaría pasar mucho menos tiempo en el campo y también usar menos fertilizante. Los ingenieros de Deere se asociaron con ingenieros de la Universidad de Stanford para desarrollar un tractor autónomo controlado por GPS. A pesar de algunas demostraciones exitosas en condiciones idealizadas, estaba claro que necesitaban un sistema GPS que fuera más preciso y más fácil de usar.
De vuelta a la mesa de dibujo.
Luego, Deere trabajó con el Laboratorio de Propulsión a Chorro de la NASA y la Tecnología NavCom (ahora una subsidiaria de Deere) en un mejor sistema GPS. El resultado fue el primer receptor GPS de Deere, que también trabajó con otras constelaciones regionales de satélites de posicionamiento. La versión de 1996, que se muestra arriba, fue apodada cariñosamente Green Eggs and Ham. Diseñado para montarse en la parte superior de la cabina de un tractor, llevaba una antena de GPS y una antena de banda C que utilizaba señales de estaciones base regionales para corregir las lecturas de GPS. En ese momento, el gobierno de EE. UU. Aún degradaba intencionalmente las señales de GPS destinado al uso civil, una práctica que finalmente abandonó en mayo de 2000. Si bien los productos de la competencia también hicieron algunas correcciones de GPS, el receptor Deere fue más preciso porque corrigió las señales provenientes de cada satélite GPS.
Ambas antenas estaban ubicadas debajo de la «yema» amarilla. El dispositivo conectado a las pantallas y al sistema de mapeo dentro de la cabina. Además de ser precisa, la unidad tenía que ser resistente, capaz de soportar un clima pésimo, temperaturas de –20 ° a 45 ° C, vibraciones de vehículos e incursiones ocasionales de roedores, pájaros y otras criaturas.
Tractores john deere
Foto: Deere & Co.
Trabajo de campo: el receptor GPS «huevos y jamón verde» de John Deere, que entró en producción en 1997 como StarFire, se encuentra en la parte superior de la cabina de un tractor.
Mientras tanto, los ingenieros de Deere continuaron trabajando en AutoTrac, su tractor autónomo. Incorporaron en el StarFire de segunda generación la capacidad de conectarse con un módulo de compensación de terreno, lo que permitió que el sistema GPS del tractor siguiera los contornos del suelo y trazara una línea exactamente paralela a la trayectoria anterior del tractor. AutoTrac se lanzó como producto comercial en 2002.
Hoy en día, la combinación de un GPS más preciso y un control de vehículos autónomo ha hecho que la agricultura de precisión sea económica, al menos para las grandes explotaciones. Los sistemas autoguiados ahora cultivan aproximadamente del 60 al 70 por ciento de la superficie cultivada en América del Norte, del 30 al 50 por ciento en Europa y más del 90 por ciento en Australia.
El receptor GPS Green Eggs and Ham de John Deere se exhibirá hasta junio de 2018 en el Museo Nacional de Historia Estadounidense en Washington, DC, como parte de la feria Precision Farming.
Una versión abreviada de este artículo aparece en la edición impresa de marzo de 2018 como «Arando con precisión».
Parte de una serie continua que analiza fotografías de artefactos históricos que abarcan el potencial ilimitado de la tecnología.